黄色いサイコロを追うロボット
最近プログラムができる「おもちゃ」にはまっています。
対象となる物体を検知し追跡するロボットです。
– 使ったもの
* MeArmPi (ラズパイで動くロボットアームキット)
* Raspberry Pi 3B / カメラモジュール(PiCamera)
* OpenCV: 画像認識ライブラリ
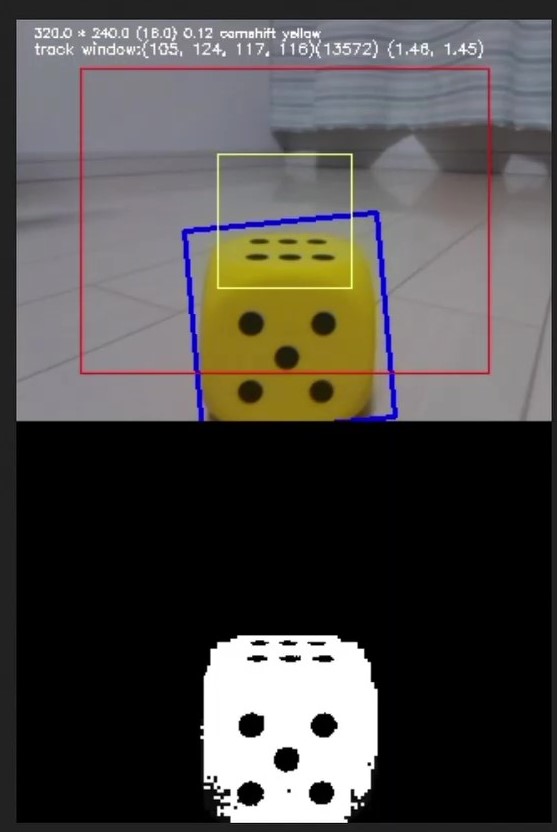
動画では「黄色いもの」を検知しています。上部はロボットカメラの映像です。
下部は物体の検出に使われる「ヒストグラムの逆投影」です。
下部は物体の検出に使われる「ヒストグラムの逆投影」です。
仕組みは検知した物体の位置が赤枠を超えると枠内に戻す方向にロボットア
今回、物体追跡を初めてやりましたが趣味でやる分には楽しい分野でした。
OpenCVを使った物体追跡のサンプルコードは公式サイトにあります。興味ある方はぜひ。